



ABB机器人常见问题及解决方法:机器人与相机一般采用socket通讯(TCP/IP)。所以机器人需要有pc-interface选项。机器人在开机时进入了系统故障状态应该如何处理?1.重新启动一次机器人。2.如果不行,在示教器查看是否有更详细的报警提示,并进行处理。3.重启。4.如果还不能解除则尝试B启动。5.如果还不行,请尝试P启动。6.如果还不行请尝试I启动(这将机器人回到出厂设置状态,小心)。

使用示教器,您可以开发存储在示教器中的程序,然后在需要时更轻松快速地运行。一个这样的程序是零程序。零程序将机器人的每个轴运行到零位置。零程序的一个用途是操作员可以使用它来确保机器人母带制作仍然正确。机器人示教器维修运行零程序是验证机器人掌握的良好的步。要了解有关母带制作的更多信息并确保不丢失要点。机器人示教器维修在您输入和运行零程序之前:TP必须为ON,必须能够在机器人移动之前重置故障,控制器必须在教学。
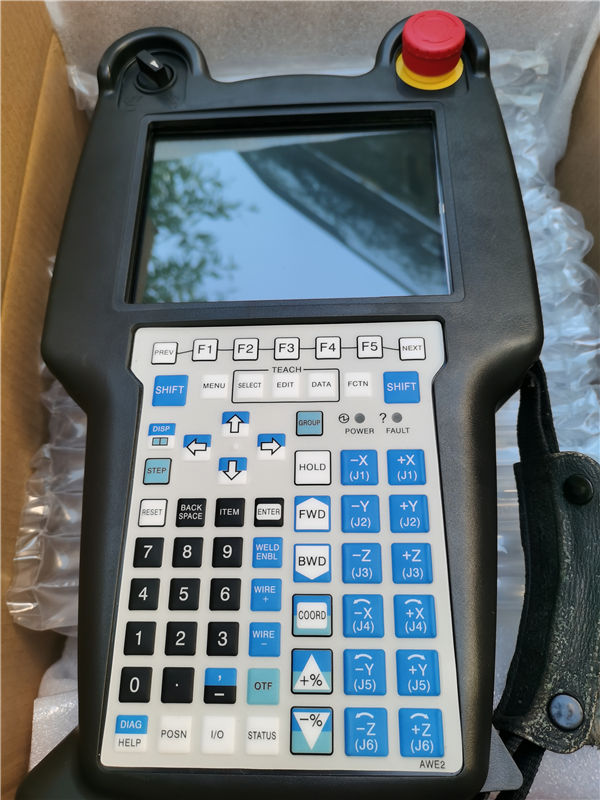
由于机器人控制器等的闭合,基于力传感器的速度调节的直接教导难以应用于其他机器人。机器人示教器维修通过使用位置控制而无需更改控制器即可实现直接控制。采用基于主动合规控制的直接教学方法。六维力传感器安装在机器人的末端以检测外力信息,并且通过力坐标变换获得工作坐标系的力信号,机器人示教器维修并且将获得的力信号转换为机器人末端执行器。位置校正量实现机器人的直接拖动教学。该方法对机器人控制器没有特殊要求,具有良好的通用性。






 在线客服
在线客服 18842585256
18842585256 871198204@qq.com
871198204@qq.com